Our laboratory designs devices and algorithms to precisely measure and control motion/forces in the brain, heart, lung, and reproductive system. We are interested in sensors, machine learning, robotics, biomechanics and pathophysiology as a means of solving pressing clinical problems.
Biomechanics of concussion
 Traumatic brain injury (TBI) is a leading cause of death and disability in the U.S., affecting a broad swath of the population, from infants to the elderly and all ages in between due to vehicular accidents, violence, and sports. We study the biomechanics of concussion through the development of diagnostic sensors, preventative equipment, and computational models of the brain and cervical spine. To “sense” concussion, we instrument high school and collegiate athletes in football, lacrosse, MMA, and other contact sports with inertial sensors which measure the severity of impacts. Using this information, we can simulate the response of the brain to impact to better understand the underlying mechanisms of concussion. Lastly, we develop head and neck protective gear to mitigate these injuries.
Traumatic brain injury (TBI) is a leading cause of death and disability in the U.S., affecting a broad swath of the population, from infants to the elderly and all ages in between due to vehicular accidents, violence, and sports. We study the biomechanics of concussion through the development of diagnostic sensors, preventative equipment, and computational models of the brain and cervical spine. To “sense” concussion, we instrument high school and collegiate athletes in football, lacrosse, MMA, and other contact sports with inertial sensors which measure the severity of impacts. Using this information, we can simulate the response of the brain to impact to better understand the underlying mechanisms of concussion. Lastly, we develop head and neck protective gear to mitigate these injuries.
Watch TEDx: Why Helmets Don’t Prevent Concussions – and What Might
We are disseminating the Stanford Instrumented Mouthguard around the world for researchers to measure and share biomechanical and clinical data.
Selected papers
Laksari, K., Kurt, M., Babaee, H., Kleiven, S. and Camarillo, DB. “Mechanistic Insights into Human Brain Impact Dynamics through Modal Analysis.” (2018) Physical Review Letters 120 (13), 138101 (pdf)
Hernandez F, Wu LC, Yip MC, Laksari K, Hoffman AR, Lopez JR, Grant G, Kleiven S, Camarillo DB. “Six degree of freedom measurements of human mild traumatic brain injury.” Annals of Biomedical Engineering. vol. 43, no. 8, pp. 1918-34, 2015 (pdf)
Wu LC, Nangia V, Bui K, Hammoor B, Kurt M, Hernandez F, Kuo C, Camarillo DB. “In vivo evaluation of wearable head impact sensors.” Annals of Biomedical Engineering, vol. 44, no. 4, pp. 1234-1245, 2016 (pdf)
Assisted Ventilation
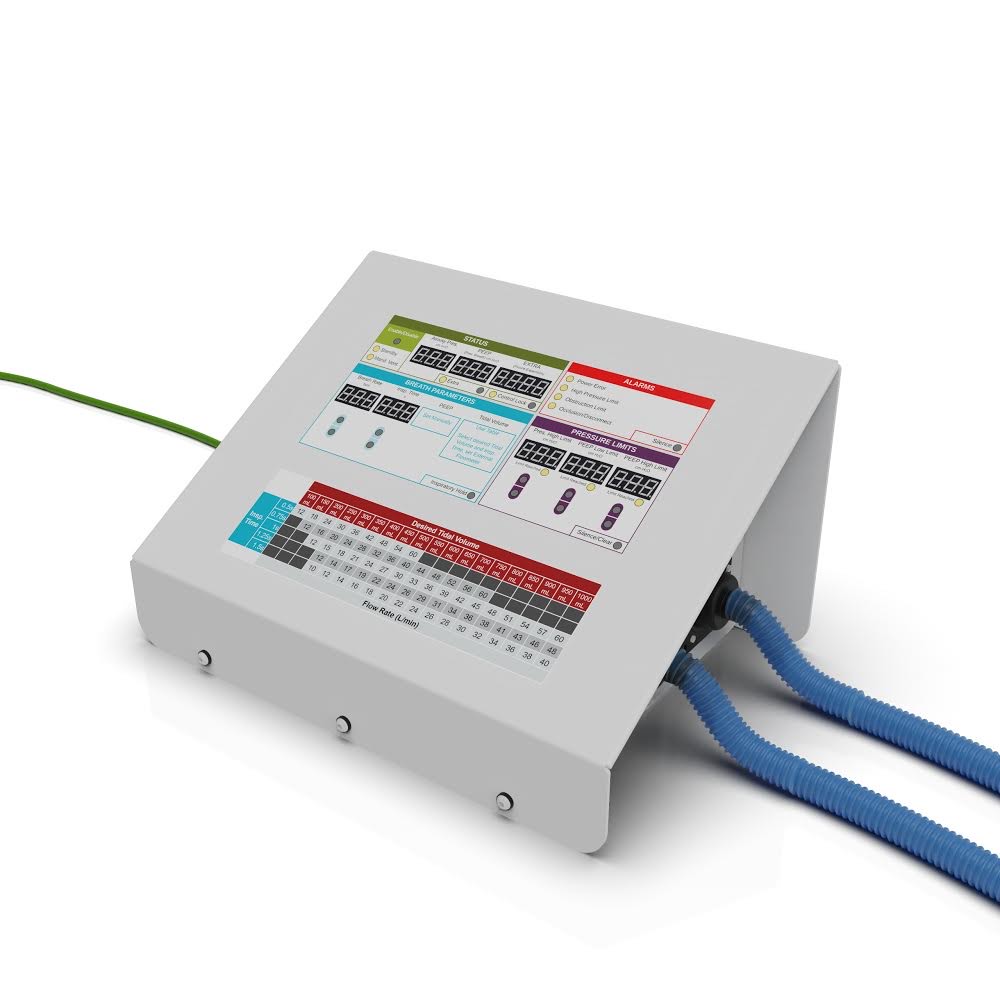 Global ventilator demand has dramatically surged due to the COVID-19 pandemic, and traditional engineering and manufacturing approaches are incapable of meeting this need. That’s the genesis behind the Stanford/CZ Biohub Ventilator Initiative.In partnership with CZ Biohub, a multidisciplinary team of physicians, respiratory therapists, academics, and industry professionals are working together at unprecedented speed to develop a simple, low-cost, single-use ventilator that can be quickly manufactured in high quantities to meet current and future needs. To achieve this humanitarian goal, the team has rapidly gone from concept to final design and is currently identifying contract manufacturers, and pursuing regulatory approval for emergency use.It takes everyone coming together to make something like this happen. We welcome individuals and businesses with component and manufacturing capabilities that can help the team meet their rapid development goals to contact us at ventilator@czbiohub.org. Thank you—and stay safe and healthy!.
Global ventilator demand has dramatically surged due to the COVID-19 pandemic, and traditional engineering and manufacturing approaches are incapable of meeting this need. That’s the genesis behind the Stanford/CZ Biohub Ventilator Initiative.In partnership with CZ Biohub, a multidisciplinary team of physicians, respiratory therapists, academics, and industry professionals are working together at unprecedented speed to develop a simple, low-cost, single-use ventilator that can be quickly manufactured in high quantities to meet current and future needs. To achieve this humanitarian goal, the team has rapidly gone from concept to final design and is currently identifying contract manufacturers, and pursuing regulatory approval for emergency use.It takes everyone coming together to make something like this happen. We welcome individuals and businesses with component and manufacturing capabilities that can help the team meet their rapid development goals to contact us at ventilator@czbiohub.org. Thank you—and stay safe and healthy!.
Selected papers
Wesolowski T, Raymond S, Van Wert R, Camarillo DB. “Low Cost Mechanical Ventilator” US Patent Application 62/994856. March 26, 2020
Soft surgical robots
 We work to improve surgical outcomes and patient access by designing algorithms to control flexible robotic catheters and endoscopes. By combining novel motion controllers and deep-learning localization methods, we aim to make surgical robots capable of handling surgical tasks on their own.
We work to improve surgical outcomes and patient access by designing algorithms to control flexible robotic catheters and endoscopes. By combining novel motion controllers and deep-learning localization methods, we aim to make surgical robots capable of handling surgical tasks on their own.
We focus on two organ systems: the heart and the lung. In the heart, our algorithms precisely position ablation catheters to treat atrial fibrillation. In the lung, we hope to improve lung cancer biopsies. Navigating surgical tools in the tortuous airways requires accurate, real-time localization of the tools with respect to the preoperative scan of the anatomy.
Image Courtesy Auris Health, Inc.
Watch Deep Learning of Lung Bifurcations for Robotic Localization
Selected papers
Sganga J, Eng D, Graetzel C, Camarillo DB. “Deep Learning for Localization in the Lung”. arXiv, 2019 (pdf)
Sganga J, Eng D, Graetzel C, Camarillo DB. “OffsetNet: Deep Learning for Localization in the Lung using Rendered Images”. in Robotics and Automation (ICRA), 2019 IEEE International Conference, Montreal, CAN 2019 (pdf)
Yip MC, Camarillo DB. “Model-less Feedback Control of Continuum Manipulators in Constrained Environments.” IEEE Transactions on Robotics. vol. PP, no. 99, pp. 1-10. 2013 (pdf)
Reproductive biomechanics
 Nearly 1 out of 6 couples in the U.S. seeking to have children experience infertility, and many turn to in vitro fertilization (IVF) to become pregnant. However, only 30% of IVF cycles result in a live birth. During IVF, a clinician attempts to select the most viable embryos to transfer back to the mother based on a morphological assessment at day 3 after fertilization. This assessment is a poor predictor of viability, so multiple embryos are transferred back to the mother in 90% of cases in order to increase the chances for a successful pregnancy, which can lead to risks associated with multiple gestation pregnancies. We are developing a quantitative, noninvasive and early (day 1) measure of viability in order to allow clinicians to transfer the single most viable embryo, reducing the incidence of multiple gestations while preserving the pregnancy and birth rate of IVF.
Nearly 1 out of 6 couples in the U.S. seeking to have children experience infertility, and many turn to in vitro fertilization (IVF) to become pregnant. However, only 30% of IVF cycles result in a live birth. During IVF, a clinician attempts to select the most viable embryos to transfer back to the mother based on a morphological assessment at day 3 after fertilization. This assessment is a poor predictor of viability, so multiple embryos are transferred back to the mother in 90% of cases in order to increase the chances for a successful pregnancy, which can lead to risks associated with multiple gestation pregnancies. We are developing a quantitative, noninvasive and early (day 1) measure of viability in order to allow clinicians to transfer the single most viable embryo, reducing the incidence of multiple gestations while preserving the pregnancy and birth rate of IVF.
Selected papers
Zarnescu L, Han J, Behr B, Reijo Pera R, Camarillo DB. “Human oocyte developmental potential is predicted by mechanical properties within hours after fertilization.” Nature Communications, vol. 7, 2016 (pdf)